在工业自动化向柔性制造、自主导航演进的当下,移动机器人(AMR/AGV)早已不再是单纯的执行机构,而是集环境感知、决策规划与高精度运动控制于一体的智能体。传统控制器往往受限于算力瓶颈与接口性能,难以承载多传感器融合与激光+视觉融合SLAM的高带宽需求。基于瑞芯微RK3588八核旗舰处理器打造的AR707嵌入式控制器,凭借6 TOPS NPU、多路视觉接口及高密度工业I/O,为移动机器人构建起兼顾视觉算力与工业控制的可靠基座。

一、RK3588:从运动控制到环境理解的跃迁
AR707搭载RK3588八核处理器(4×Cortex-A76 + 4×Cortex-A55),单核最高主频可达2.4GHz,配合板载LPDDR4X 8GB内存与64GB eMMC存储,为多任务并行与地图数据缓存提供充裕资源。其内置的6 TOPS NPU不再仅用于简单的路径规划,而是直接支撑本地化视觉AI模型推理——如动态避障、行人识别、货物检测等,真正实现“端侧智能”。相比传统方案,AR707在复杂环境下的响应速度显著提升。
二、多路视觉中枢:8K显示与多摄接入
移动机器人对视觉系统的依赖日益加深。AR707在视觉扩展方面展现出极强优势:
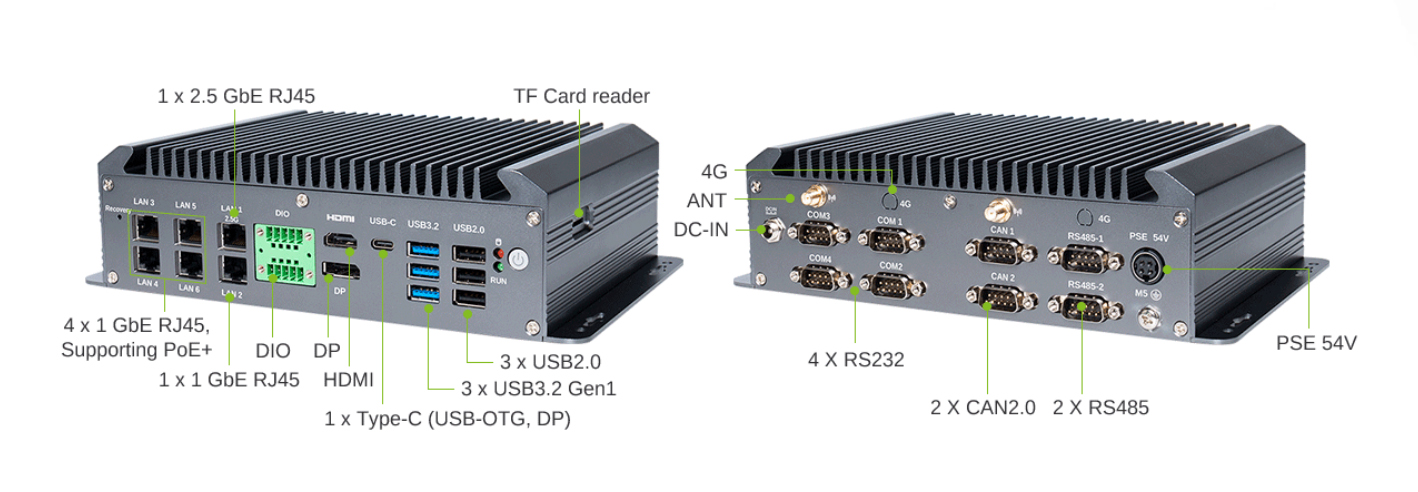
超高分辨率显示:支持HDMI™+ DP + Type-C三路输出,最大可驱动8K@60Hz显示。充分满足机器人显示、调试等功能需求。
多摄像头接入:依托RK3588原生的多通道ISP能力,AR707可同时接入多个MIPI CSI摄像头,实现360°环视、深度感知与特征点提取,满足视觉SLAM与3D重建对高帧率、低延迟图像的苛刻要求。
这一“视觉中枢”特性,使AR707不仅承担底层运动控制,更能直接处理激光雷达、深度相机等传感器数据,减少外部计算盒的使用,简化整机架构。
三、高密度工业I/O:精准控制的底座
作为一款面向移动机器人的控制器,AR707在I/O密度与可靠性上同样表现出色:
常规通信:提供4×RS232、2×RS485、2×CAN,可对接绝大多数伺服驱动器、IMU、超声波雷达等外设,满足多轴底盘与机械臂协同控制需求。
数字量控制:集成4×DI、4×DO,可直接对接急停按钮、光电传感器、报警指示灯等安全链路,构建闭环控制体系。
网络连接:配备1×2.5G RJ45 + 5×千兆RJ45(其中4路支持POE),在高速骨干网与多设备供电方面表现优异,特别适合多机协作与云端调度场景。
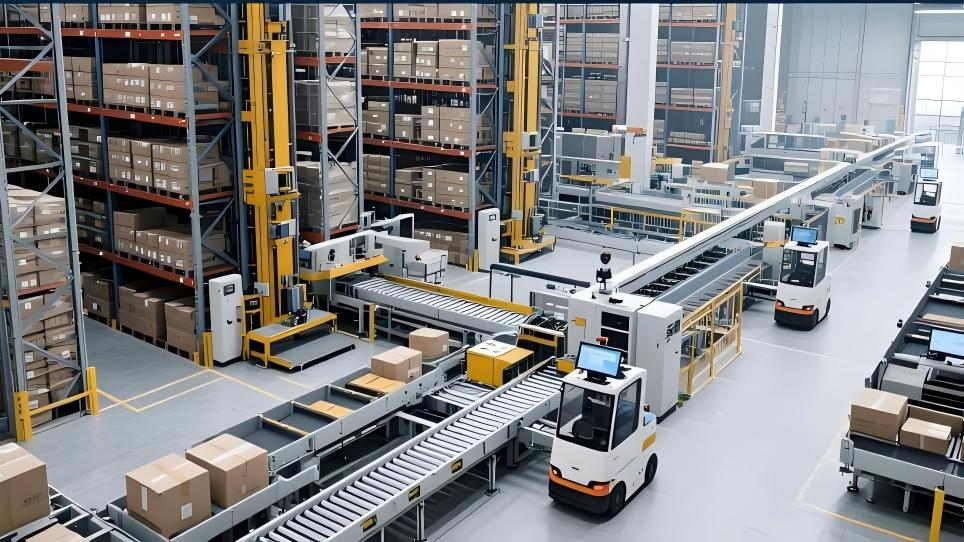
四、场景化:自主导航机器人的“多目环视避障”
需求:物流配送机器人或叉车AGV在人机混行的环境中,需要360°无死角感知,通常需搭载前视RGB相机、深度相机及侧向辅助相机。
AR707方案:利用多路POE网口及MIPI CSI接口,同时接入多个视觉传感器。
价值:4路POE网口可独立为高带宽相机供电,避免了多设备同时取电造成的电源波动;配合内置的6 TOPS NPU,直接在端侧运行YOLO等视觉模型,实现“所见即所得”的动态避障。
五、结语
从6 TOPS AI算力驱动的视觉感知,到8K多屏输出的可视化能力,再到RS485/CAN/DI/DO构建的工业控制底座,AR707已超越传统“运动控制器”的范畴,进化为移动机器人的综合智能中枢。对于希望在单一平台上实现导航、感知、交互与控制的机器人厂商而言,AR707不仅降低了系统复杂度,更为自主移动机器人的快速落地提供了坚实的硬件基石。


 杰和公众号
杰和公众号
 杰和视频号
杰和视频号